



قامت مجموعة بحثية بإبتكار طريقة جديدة تحسن قدرات الروبوتات في تعلم المهام الإنسانية، من خلال التحكم في الأشياء وتحريكها بالسهولة ذاتها التي تتمتع بها اليد البشرية.
وقامت "OpenAI"، وهي مجموعة بحثية في مجال الروبوتات يدعمها رائدو التكنولوجيا بما في ذلك إيلون موسك وبيتر ثيل، بتدريب يد الروبوت على اللعب بالأشياء باستخدام نظام مطور يدعى "Dactyl".
وقد سمحت المحاكاة الحاسوبية ليد الروبوت بتعلم حركات جديدة عن طريق التجربة والخطأ، وعملت بمثابة اليد الحقيقة اعتمادا على مجموعة من البيانات، ما لا يتطلب أي تدخل بشري على الإطلاق.
وأوضح الباحثون: "في حين أن معالجة الأشياء ببراعة تعتبر مهمة يومية أساسية للبشر، إلا أنها ما تزال تحديا بالنسبة للإنسان الآلي في المستقبل". وأضافوا: "في هذا العمل، نوضح أساليب تدريب سياسات التحكم التي تؤثر على اليد البشرية وتطبيقها على اليد الآلية".
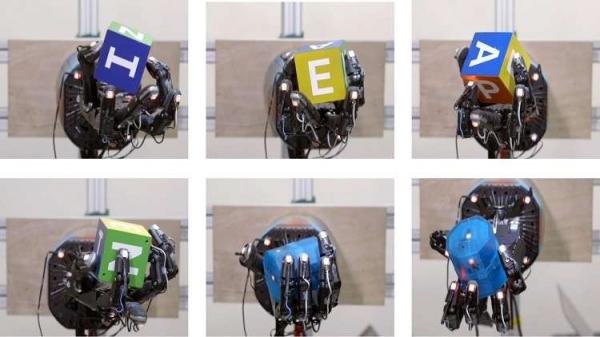
وخلال الاختبار، كان النظام الجديد قادرا على اكتشاف الحيل البشرية في التعامل مع الأشياء بمفرده، بالاعتماد على آلية التعلم ومجموعة من المعلومات التي تساعد الذكاء الاصطناعي في تكوين فكرة أفضل عن معالجة الأشياء والقدرة على تحريكها، مثل القدرة التي أظهرتها اليد الآلية أثناء التعامل مع مكعب، حيث كان بإمكانها تدويره دون إسقاطه.
وذكر الباحثون "أن اليد الآلية كانت قادرة على أداء أنواع مختلفة من القبضات التي كانت حصرية للبشر في السابق، مثل النقل الثلاثي والذي يتضمن استخدام الإبهام والسبابة والإصبع الأوسط، جنبا إلى جنب مع استخدام طريقة لنقل الأشياء باستخدام الإبهام والسبابة فقط".
وهذا يعني أن نظام "Dactyl" قادر على استكشاف القدرات البشرية في تحريك اليد وتكييفها لتتناسب بشكل أفضل مع قدرات الآلة.
ويعتقد الباحثون أن هذا المشروع يمكن أن يكون بمثابة مثال مهم حول قدرات خوارزميات التعلم الآلي وما يمكنها القيام به.
وبالإضافة إلى ذلك، ومن خلال المهارات التي أظهرها الروبوت، فإن هذا الدهاء يمكن أن تكون له آثار إيجابية على الشركات التي تسعى لأتمتة القوى العاملة لديها.
وتوصل الباحثون إلى أن نتائجهم "تثبت أنه على عكس المعتقدات الشائعة، يمكن تطبيق الخوارزميات لحل مشاكل الروبوتات المعقدة التي لا يمكن الوصول إليها من المقاربات القائمة على التعلم".
